 泵閥商務網
泵閥商務網


詳細介紹
一、擋板門電動執行機構,7000Nm電動裝置?述概
DKJ電子式系列角行程電動執行機構是工業過程測量和控制系統的終端控制裝置,它能夠將系統的控制信號轉換成輸出軸的角位移控制閥門截流件的位置或其它調節機構,使被控介質按系統規定狀態的工作。
電動執行機構按控制方式分為比例和積分式。比例式執行機構由伺服電機,減速器,具有伺服功能的位置發送器和積分式執行機構組成,它能夠將系統的控制信號與關于輸出軸位置的反饋信號加以比較(閉環控制)以改變輸出軸的行程,使之與輸出信號成比例關系。積分式執行機構由伺服電機、減速器及普通位置發送器組成,它能夠與電動操作器配合對閥門或其它調節機構實現遠方操作。
使用電動執行機構的自動控制系統配用DFD系列電動操作器可以實現控制系統“自動”—“手動”工作狀態的無憂動切換。
電動執行機構安全可靠、安裝、調試、操作、維修方便,廣泛應用在能源、冶金、化工、建材等行業,在工業過程測量和控制系統中發揮重要作用。
二、擋板門電動執行機構,7000Nm電動裝置?規格型號
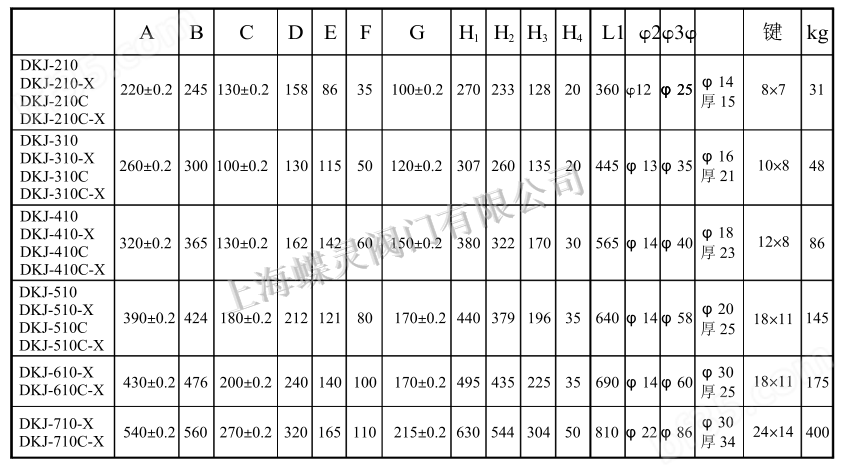
【型號及外型尺寸圖】
型號 | 型號 | 力矩 | 行程時間 |
DKJ-210 | DKJ-2100 | 100Nm | 25 |
DKJ-310 | DKJ-3100 | 250Nm | |
DKJ-410 | DKJ-4100 | 600 Nm | |
DKJ-510 | DKJ-5100 | 1600 Nm | |
DKJ-610A | DKJ-6100A | 2500 Nm | 40 |
DKJ-610 | DKJ-6100 | 4000 Nm | 60 |
DKJ-710 | DKJ-7100 | 6000 Nm | 100 |
| |||||
|
動力條件 1.單相交流電 +10%
環境條件 2. ±1% 頻率:50Hz -15%; 電壓:220V
溫度、相對濕度 2.1電動執行機構為室內現場安裝儀表。 大氣壓力:86~106Kpa。 2.2 溫度:-10~+55℃。相對濕度:不大于95%。
周圍空氣中無起腐蝕作用的介質。 2.3
四、主要技術性能
輸出軸的額定負載,額定行程及額定行程時間。 1. DKJ電子式系列角行程電動執行機構按照中華人民共和國國家標準GB11922-89《工業過程測量和控制系統用電動執行機構》的規定制造,主要技術性能如下。
電動執行機構的工作信號范圍。 2.
參比工作性能 3.基本誤差限:不超過額定行程的±2.5%。回差:不大于額定行程的1.5%。額定行程時間誤差:不超過額定行程時間的±20%。比例式執行機構 死區:不大于輸入量程3%。阻尼特性:不大于3次半周期擺動。積分式執行機構
惰走量:不大于額定行程的1%(額定行程時間為>10~< 25s時);
絕緣電阻: 4.
不小于20MΩ結構與工作原理說明 輸入端子——機殼 不小于50MΩ 電源端子——輸入端子 不小于50MΩ 電源端子——機殼 在溫度為15~35℃,相對濕度為45%~75%時,
電子式電動執行機構是一個以兩相伺服電動機為動力源的位置伺服機構,由伺服電動機、減速器、伺放定位模塊及位置傳感裝置等部件組成。
當伺放定位模塊中有控制信號輸入時,它與來自位置傳感器的位置反饋信號進行比較,如果存在信號偏差,伺放定位模塊則通過放大導通相應回路以驅動伺服電動機轉動使減速器的輸出軸朝著減小這一偏差的方向移動(位置傳感器不斷將輸出軸的實際位置轉變為位置反饋信號送回伺放定位模塊)直到信號偏差小于死區為止,此時輸出軸就穩定在與輸入信號相對應的位置上。輸出軸的行程與輸入信號成比例關系。
電動機為鼠籠式兩相交流伺服電動機。該電動機轉子內阻較大,具有較大的起動轉矩和較軟的機械特性。在伺服電動機的尾部裝有制動裝置,能在電動機失電后迅速制動,有效地限制輸出軸的慣性惰走及負載反作用力矩的影響,使輸出軸準確地停止在確定的位置上,改善系統的穩定性,電動執行機構采用交流電容器做為兩相伺服電動機的分相電容,提高了產品的可靠性。
減速器采用一級圓柱齒輪和一級漸開線小齒差行星齒輪轉動,具有傳動比大、體積小、效率高、噪音小、壽命長等特點。在減速器上設置了手輪裝置供就地調整和操作,手輪轉動方向與輸出軸相同。
伺服電動機安裝在減速器上它的后罩上有手柄,可以左右轉動進行“電動”與“手動”狀態切換,在安裝調試及系統或線路出現故障時可斷開電源,拉出手輪至“手動”位置(電動機的手柄也扳至“手動”位置)進行就地操作。
在減速器的端蓋上配置有兩塊由T型槽螺釘和螺母緊固的制動塊,這就是角行程執行機構的機械限位裝置。 除斷電進行手動就地操作之外,手輪及電動機手柄務必置于“電動”位置。
電動執行機構的校核:
絕緣電阻校核 3. 執行機構標識的各項內容符合系統及閥門正常工作的需要。 2. 使現場的動力條件、環境條件符合本說明書第三章的規定。 1. 每臺電動執行機構在出廠前均已按標準進行了嚴格檢驗,考慮到運輸及貯存影響,為確保使用安全,請用戶在安裝使用之前進行如下校核: 4.1緊固件檢查 機械校核 4. 用500E兆歐表測量本說明書第四章所述各組導線間及其與機殼間的絕緣電阻,應符合規定。 各緊固件無松動現象,如有松動,務*旋具擰緊。4.2可動零部件檢查手輪及電動機后罩上的手柄(以下簡稱電動機手柄)在“手動”—“電動”位置間切換靈活,在規定位置上能被內部的鋼球可靠定位(手輪軸上的鋼球壓力可用手輪前面的緊定螺釘調整)在“電動”位置手輪空轉靈活。 檢查完畢,務必將手輪及電動機手柄復位到“電動”。
接插件檢查 5.執行機構工作狀態的調試 各插頭插座安裝牢固、接觸牢靠,卸下插頭,檢查各接觸對應物無銹蝕、變形等影響接觸的缺陷。
2檢查無誤后 1按接線圖3接好線。 3將開關置于手動狀態。 通電。
4校整行程開、關方向:操作開時,終端開關頂開后馬達應停止。操作關時,終端 開關頂開后馬達應停止。如果不是這樣,請將終端開關8與9;7與10同時對調。如果馬達開關方向與手操方向不符,請將15、16對調;如果馬達開關方向與反饋電流增減方向不符,請將位置電位器的12與14對調。
5校整4—20毫安:手動使執行機構向關的方向運轉,關終端開關被頂開停止后,
%。 旋轉位置電位器使反饋電流為4毫安,顯示“0”手動使執行機構向開的方向運轉,開終端開關被頂開停止后,調整*電位器
%。一般反復兩次。 至20毫安,顯示“100”
6將開關置于自動狀態,將輸出4、5反饋信號接到系統中(或接電流表或短接), 如果發生震蕩,請調節死區電位器使之增加死區。(逆時針旋轉死區增加)。 在1、2端輸入4—20毫安給定信號。分別在4、8、12、16、20毫安處輸入信號,觀察顯示誤差,分別顯示0、25、50、75、*(誤差小于1%)。
7后試驗斷信號保護,將給定信號或反饋信號斷掉,運行中的執行機構應立即停
止。
8觀察電制動功能是否干脆且無惰走。
9一般在出廠時執行機構已按正行程調整好,如果現場需要反行程,請將終端開關端子8與9;7與10;位置電位器端子12與14;馬達端子15與16 同時對調。
10端子5是電源的負極即公共端。
11特別注意:15、16至馬達之間的連線不能串接任何開關。容易造成打火損壞固態繼電器。
七、電動執行機構的安裝、調整、使用與維護
1.安裝
執行機構安裝在混凝土或金屬骨架的基座上并用地腳螺釘緊固。執行機構的輸出臂終端可通過連桿及接頭與調節機構連接。
執行機構在出廠時未加潤滑油,在正式投入運行前應取下減速器上方的吊環螺釘,從該螺孔內加入潤滑脂。
2.工作位置調整 電動執行機構的外形及安裝尺寸見圖4,接線端子見圖5.
松開緊固制動塊的螺母,卸下電動機插頭,拆下位置發送器罩蓋,將手輪及電動機手柄置于“手動”位置,搖動手輪使輸出軸轉動到對應于位置反饋電流下限的位置(以下簡稱下限位置)。根據工作狀態是正作用還是反作用使一個制動塊緊貼住輸出臂,緊固好固定制動塊的螺母,搖動手輪(正作用時順時針轉動,反作用時逆時針轉動),使輸出軸轉動90°(此位置以下簡稱上限位置)。使另一個制動塊緊貼住輸出臂另一側,緊固好螺母。根據第五章對于凸輪——微動開關的說明,調整凸輪,使其在輸出軸位于兩極限位置時使相應的微動開關動作,將凸輪軸上的圓螺母緊固好。接好電動機插頭,將手輪及電動機手柄置于“電動”位置,接通電源,使輸出軸往復旋轉,觀察調整的正確性。將輸出軸轉動到下限位置,松開緊固導電塑料電位器的壓板上的螺釘,握住電位器使之緩慢轉動到位置反饋電流為工作信號范圍下*為止,緊固好壓板上的螺釘。如有差異可調整印制電路板上的“0%”電位器,接通電動機使輸出軸向上限方向轉動,位置反饋電流應增加(如位置反饋電流在減少到某一點后突然陡上又減少,則須將導電塑料電位器上的1、3接線頭對調并重新調整位置反饋電流下限。當輸出軸到達上限后,調整印制線路板上的*電位器,使位置反饋信號為工作信號范圍上限。
然后將電機插頭插進插座內,使輸入信號為工作信號范圍下限,輸出軸應轉動到下限位置,如偏離,可調整導電塑料電位器或印制電路板上的0%電位器;使輸入信號為工作范圍上限,輸出軸應轉到到上限位置,如偏離,可調整印制電路板上的*電位器。
使用 3. 調整完畢,裝好位置發送器的罩蓋。 通電運行前務必仔細檢查接線是否正確,手輪及電動機手柄是否置于“電動”位置。電動執行機構有3種操作方式:
a.“自動”操作——接受系統的控制信號自動運行操作。
c.就地操作——斷開電流,操作人員轉動手輪對機構實行就地操作。 b.“手動”操作(遠方控制)——人為給定信號使執行機構實現電動操作。
 泵閥商務網
泵閥商務網